
CountDownLatch 基于 AQS 共享锁模式实现原理分析
背景描述
CountDownLatch 是 JDK 中提供的一个非常有用的工具类,在实际的工作中也有很多应用场景,比如,在一段业务逻辑中可能要进行几个操作,这些操作彼此之间没有关联,这些操作在完成之后继续进行后续操作,如果采用串行的操作方式,业务逻辑执行时间也是累加关系;如果采用 CountDownLatch 工具类,可以开启多个线程并行执行这些操作,执行成功后调用 countDown() 减一,主线程调用 await() 进入等待状态,当子线程全部执行完毕,count 值减到 0 之后,唤醒主线程继续执行,这个时候代码执行时间就不是累加关系了,而是执行最慢操作执行时间,这就是 CountDownLatch 工具类的妙处。
A synchronization aid that allows one or more threads to wait until a set of operations being performed in other threads completes.
我们来看一下 JDK 注释中给出的 CountDownLatch 的使用示例:
1 | class Driver2 { // ... |
下面我们来分析一下 CountDownLatch 的实现原理,本文代码分析都是以 JDK1.8 源代码为基础进行分析。
AQS 原理
CountDownLatch 的核心实现原理是基于 AQS,AQS 全称 AbstractQueuedSynchronizer,是 java.util.concurrent 中提供的一种高效且可扩展的同步机制;它是一种提供了原子式管理同步状态、阻塞和唤醒线程功能以及队列模型的简单框架。除了 CountDownLatch 工具类,JDK 当中的 Semaphore、ReentrantLock 等工具类都是基于 AQS 来实现的。下面我们用 CountDownLatch 来分析一下 AQS 的实现。
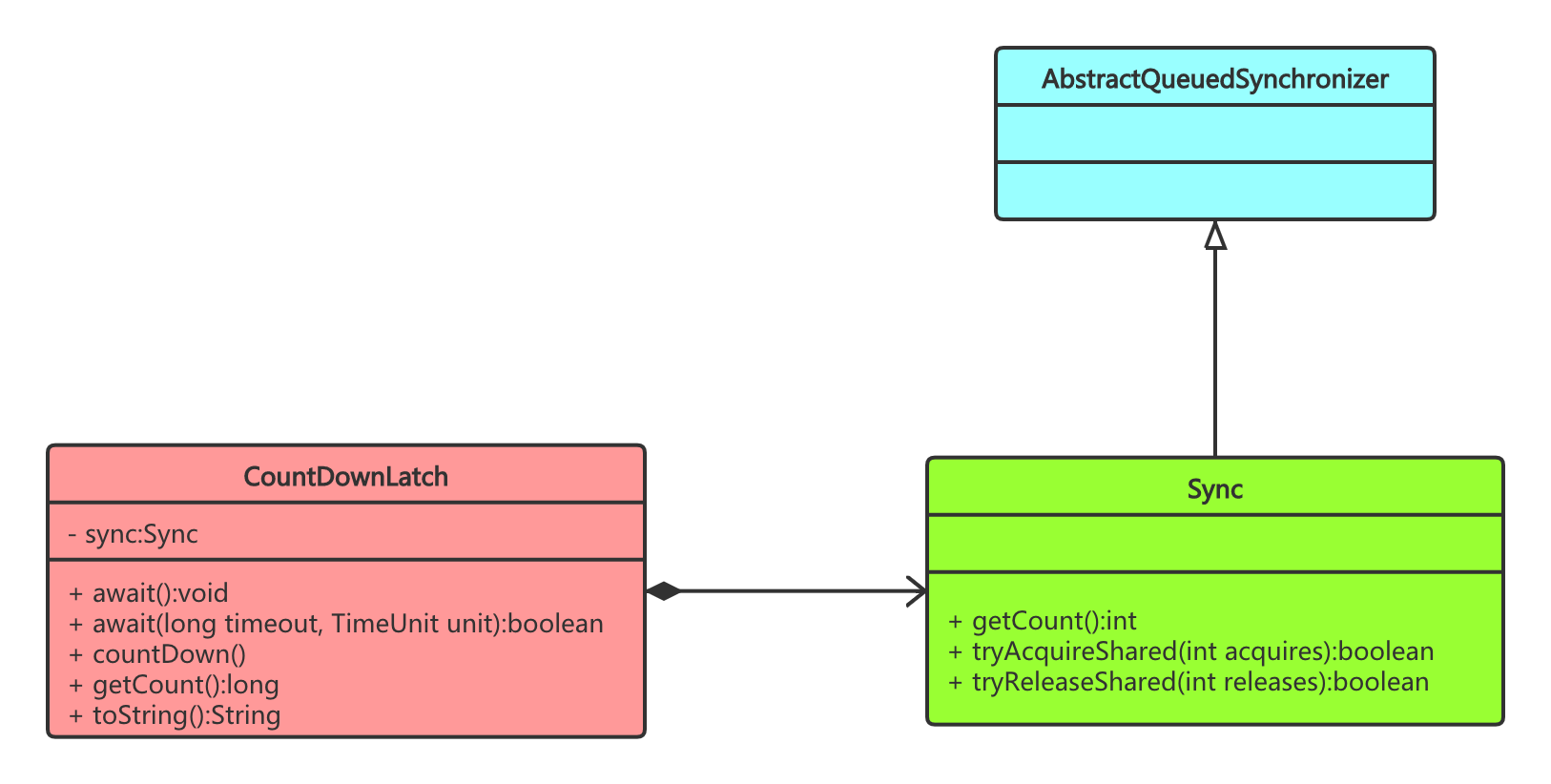
其实,如果我们阅读 CountDownLatch 的源码实现,发现其实它的代码实现非常简单,算上注释也才 300+ 行代码,如果去掉注释的话代码不到 100 行,大部分方法实现都是调用的 Sync 这个静态内部类的实现,而 Sync 就是继承自 AbstractQueuedSynchronizer。
Sync 重写了 AQS 中的 tryAcquireShared 和 tryReleaseShared 两个方法。当调用 CountDownLatch 的 awit() 方法时,会调用内部类 Sync 的 acquireSharedInterruptibly() 方法,然后在这个方法中会调用 tryAcquireShared 方法,这个方法就是 Sync 重写的 AQS 中的方法;调用 countDown() 方法原理基本类似。
通过内部类继承的方式是我们使用 AbstractQueuedSynchronizer 的标准方式:
- 内部持有继承自
AbstractQueuedSynchronizer的对象Sync; - 在
Sync内重写AbstractQueuedSynchronizer内部protected的部分或全部方法:
1 | protected boolean tryAcquire(int arg) { |
通过需要重写的方法名称我们大致可以得知,AQS 中是分成两种模式的:独占模式和共享模式,其中 CountDownLatch 使用的是共享模式。
tryAcquire和tryRelease是对应的,前者是独占模式获取,后者是独占模式释放;tryAcquireShared和tryReleaseShared是对应的,前者是共享模式获取,后者是共享模式释放。
源码实现分析
构造方法实现
1 | public CountDownLatch(int count) { |
CountDownLatch 的构造方法中调用了 Sync 的构造方法,Sync 的构造方法调用了 AQS 类中的 setState(count); 方法:
1 | Sync(int count) { |
state 变量是 AQS 类中的一个 volatile 变量。在 CountDownLatch 中这个 state 值就是一个计数器,记录 countDown 是否已经减到 0。
1 | /** |
await() 方法实现
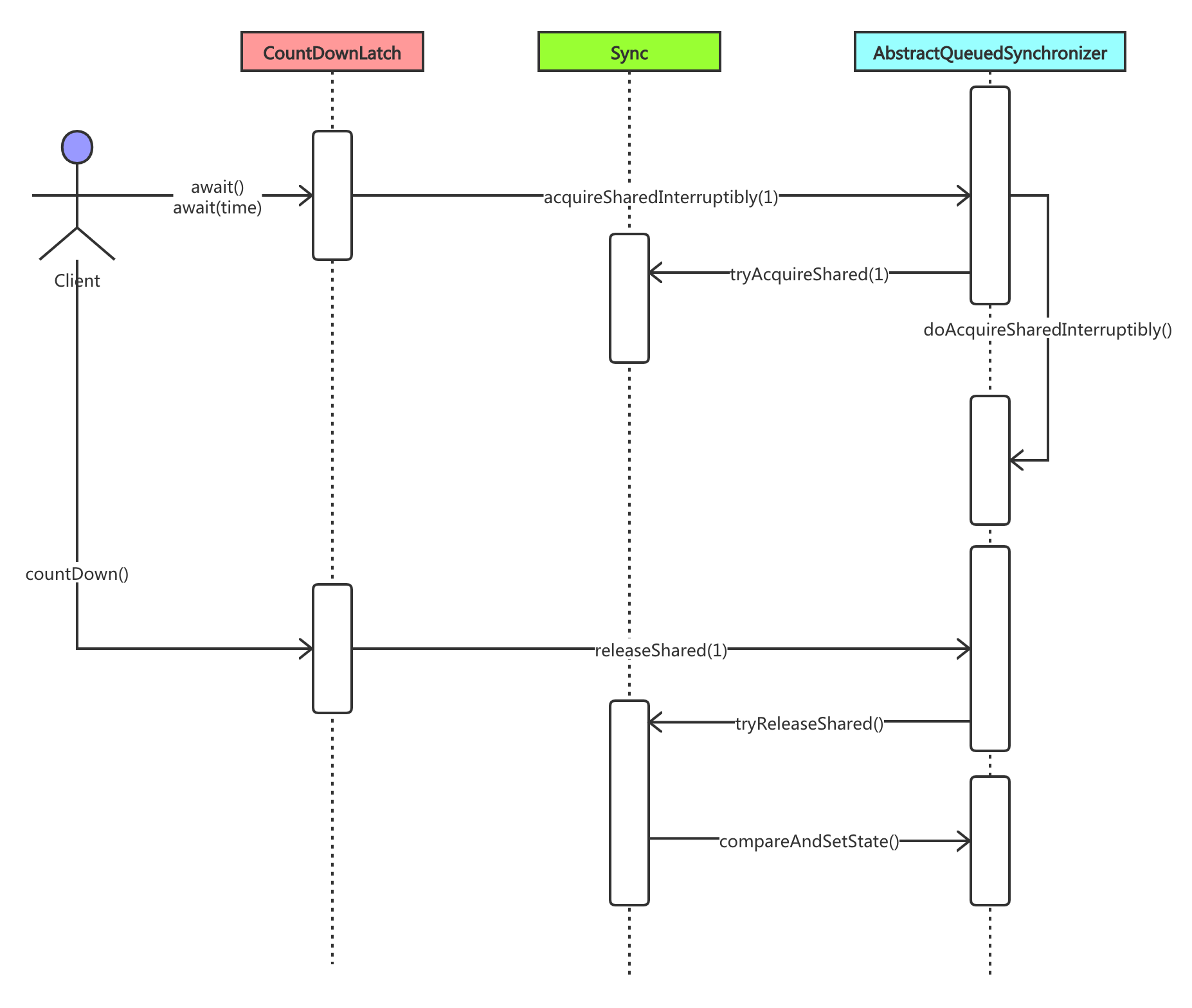
在调用 await() 方法时,会直接调用 AQS 类的 acquireSharedInterruptibly 方法,在 acquireSharedInterruptibly 方法内部会继续调用 Sync 实现类中的 tryAcquireShared 方法,在 tryAcquireShared 方法中判断 state 变量值是否为 0。
1 | public void await() throws InterruptedException { |
如果 state 值不等于 0,说明还有需要等待的线程在运行,则会执行 doAcquireSharedInterruptibly() 方法,执行该方法的第一个动作就是尝试加入等待队列,即调用 addWaiter() 方法,源码如下:
1 | /** |
这里就是 AQS 的核心实现,AQS 用内部的一个 Node 类维护一个 CHL Node FIFO 队列。将当前线程加入等待队列,并通过 parkAndCheckInterrupt() 方法实现当前线程的阻塞。
1 | private Node addWaiter(Node mode) { |
addWaiter() 方法是向等待队列中添加等待者(waiter)。首先构造一个 Node 实体,参数为当前线程和一个 Node 对象(mode),这个 mode 有两种形式,一种是 SHARED,另一种是 EXCLUSIVE。接下来需要执行入队操作,addWaiter() 方法和 enq() 方法的 else 分支操作是一样的,这里的操作如果成功了,就不用再进到 enq() 方法的循环中去了,可以提高性能;如果没有成功,再调用 enq() 方法。
1 | /** |
上面操作就是 AQS 等待队列入队方法,操作在无限循环中进行,如果入队成功则返回新的队尾节点(enq 方法中返回的是 t,感觉不是新队尾节点呢,像是队尾的前一个节点呢,不过影响不大,在 addWaiter 方法中返回的 node 是新的队尾节点),否则一直自旋,直到入队成功。假设入队的节点为 node ,上来直接进入循环,在循环中,先拿到尾节点。
if 分支,如果尾节点为 null,说明现在队列中还没有等待线程,则尝试 CAS 操作将头节点初始化,然后将尾节点也设置为头节点,因为初始化的时候头尾是同一个,这和 AQS 的设计实现有关, AQS 默认要有一个虚拟节点。此时,尾节点不在为空,循环继续,进入 else 分支;
else 分支,如果尾节点不为 null,node.prev = t ,也就是将当前尾节点设置为待入队节点的前置节点。然后又是利用 CAS 操作,将待入队的节点设置为队列的尾节点,如果 CAS 返回 false,表示未设置成功,继续循环设置,直到设置成功,接着将之前的尾节点(也就是倒数第二个节点)的 next 属性设置为当前尾节点,对应 t.next = node 语句,然后返回当前尾节点,退出循环。
1 | /** |
setHeadAndPropagate 方法负责将自旋等待或被 LockSupport 阻塞的线程唤醒。
Node 对象中有一个属性是 waitStatus,它有四种状态,分别是:
1 | //线程已被 cancelled ,这种状态的节点将会被忽略,并移出队列 |
countDown() 方法
当执行 CountDownLatch 的 countDown() 方法,将计数器减一,也就是将 state 值减一,当减到 0 的时候,等待队列中的线程被释放。是调用 AQS 的 releaseShared() 方法来实现的。
1 | // CountDownLatch 类 countDown() 方法 |
因为这是共享型的,当计数器为 0 后,会唤醒等待队列里的所有线程,所有调用了 await() 方法的线程都被唤醒,并发执行。这种情况对应到的场景是,有多个线程需要等待一些动作完成,比如一个线程完成初始化动作,其他 5 个线程都需要用到初始化的结果,那么在初始化线程调用 countDown() 之前,其他 5 个线程都处在等待状态。一旦执行线程调用了 countDown 方法将计数器减到 0,等待的 5 个线程都被唤醒,开始执行。
总结
AQS分为独占模式和共享模式,CountDownLatch使用了它的共享模式;AQS当第一个等待线程(被包装为 Node)要入队的时候,要保证存在一个head节点,这个head节点不关联线程,也就是一个虚节点;当队列中的等待节点(关联线程的,非
head节点)抢到锁,将这个节点设置为head节点;第一次自旋抢锁失败后,
waitStatus会被设置为 -1(SIGNAL),第二次再失败,就会被LockSupport阻塞挂起;如果一个节点的前置节点为
SIGNAL状态,则这个节点可以尝试抢占锁。